
Noi mușchi artificiali: roboți mai ușori, mai siguri și mai robusti
Din studii de la Politehnica din Zurich, o tehnologie pentru grupele musculare mai asemănătoare cu cele ale oamenilor și sensibilă în interacțiunile cu mediul
Cercetătorii de la ETH Zurich au dezvoltat recent mușchi artificiali pentru mișcarea roboților, dar soluția lor oferă mai multe avantaje față de tehnologiile văzute anterior.
Demn de studiu suplimentar, poate fi folosit în toate cazurile în care roboții trebuie să fie mai degrabă moi decât rigidi sau trebuie să fie mai sensibili în interacțiunea cu mediul.
Mulți robotiști visează să construiască roboți care nu sunt doar o combinație de metal sau alte materiale dure și motoare, ci și mai moi și mai adaptabili.
Automatii „moale” ar putea interacționa cu mediul într-un mod complet diferit; de exemplu, ar putea amortiza șocurile așa cum fac membrele umane sau să apuce delicat un obiect.
Acest lucru ar oferi și avantaje în ceea ce privește consumul de energie: astăzi mișcarea roboților necesită, de obicei, multă energie pentru a menține o poziție pentru o perioadă lungă de timp, în timp ce sistemele moi ar putea să o stocheze mai bine.
Deci, ce ar putea fi mai evident decât să luăm mușchiul uman ca model și să încerci să-l recreezi?
La revedere, NCCR Robotics: Doisprezece ani întregi în serviciul Elveției
Există o dronă care „se urcă” în copaci pentru a-i proteja

Fiecare mușchi natural se contractă, de asemenea, ca răspuns la un impuls electric suficient
Funcționarea mușchilor artificiali se bazează în mod necesar pe biologie.
Ca și omologii lor naturali, mușchii artificiali se contractă ca răspuns la un impuls electric.
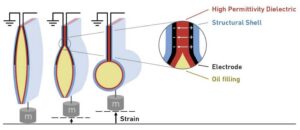
Cu toate acestea, mușchii artificiali nu constau din celule și fibre, ci dintr-un sac umplut cu un lichid (de obicei ulei), a cărui carcasă este parțial acoperită cu electrozi.
Când acești electrozi primesc o tensiune electrică, se unesc și împing lichidul în restul sacului, care se îndoaie și, prin urmare, este capabil să ridice o greutate.
Un singur sac este analog cu un mănunchi scurt de fibre musculare.
Mai multe dintre aceste pungi pot fi conectate între ele pentru a forma un element de propulsie complet, care se mai numește și actuator sau, mai simplu, mușchi artificial.
Premiu lui ProteusDrone, robotul moale cu forme mutante
Un câine robot: invenția elvețiană inspirată din biologia animală
(Ilustrație: Gravert și colab./Science/ETH Zurich)
Inițial, actuatoarele electrostatice necesitau o tensiune de 6.000 până la 10.000 de volți
Ideea dezvoltării mușchilor artificiali nu este nouă, dar până acum a existat un obstacol major în calea realizării lor: actuatoarele electrostatice funcționau doar cu tensiuni extrem de mari, de la aproximativ 6.000 până la 10.000 de volți.
Această cerință a avut mai multe consecințe: de exemplu, mușchii trebuiau conectați la amplificatoare mari și grele de tensiune, nu funcționau în apă și nu erau în totalitate siguri pentru oameni.
O nouă soluție a fost dezvoltată acum de Robert Katzschmann, profesor de robotică la ETH Zurich, împreună cu Stephan-Daniel Gravert, Elia Varini și alți colegi.
Ei au publicat un articol despre versiunea lor de mușchi artificial, care oferă de fapt mai multe avantaje, într-un articol de pe site-ul de informații „Science Advances”.
Stephan-Daniel Gravert, care lucrează ca asistent științific în laboratorul lui Robert Katzschmann, a proiectat o nouă carcasă pentru geantă.
O nouă dronă anglo-elvețiană de stingere a incendiilor pentru a ajuta pompierii
Astfel, în Elveția, roboții „învață” secretele trekking-ului

(Foto: Gravert și alții, Știință, 2024)
Soluția pentru viitor? Astăzi provine din material feroelectric cu permeabilitate ridicată
Cercetătorii numesc noile mușchi artificiali HALVE actuatori, unde HALVE înseamnă „Hydraulically Amplified Low-Voltage Electrostatic”.
„În alte actuatoare, electrozii sunt localizați în exteriorul carcasei. La noi, coaja este compusă din mai multe straturi. Am luat un material feroelectric cu permeabilitate ridicată, adică capabil să stocheze cantități relativ mari de energie electrică și l-am combinat cu un strat de electrozi. Apoi am acoperit totul cu o carcasă de polimer care are proprietăți mecanice excelente și face punga mai stabilă.”el explica.
În acest fel, cercetătorii au reușit să reducă tensiunea necesară, deoarece permitivitatea mult mai mare a materialului feroelectric permite realizarea unor forțe mari în ciuda tensiunii scăzute.
Stephan-Daniel Gravert și Elia Varini nu numai că au dezvoltat împreună carcasa actuatoarelor HALVE, dar au construit și actuatoarele în sine în laborator pentru a fi utilizate în doi roboți specifici.
La Tel Aviv un laborator Enel despre utilizarea AI și robotică în energie
Acesta este modul în care robotul Atlas poate deja să lucreze și să interacționeze cu noi
(Foto: Captură de ecran video de Gravert et al, Science, 2024)
„Cletele” și „peștele” tehnice arată ce poate face mușchiul proiectat în Elveția
Un astfel de exemplu de robot este o prindere care are 11 centimetri înălțime și are două degete.
Fiecare deget este mișcat de trei buzunare conectate în serie ale actuatorului HALVE.
O sursă de alimentare mică a bateriei alimentează robotul cu 900 de volți.
Împreună, bateria și sursa de alimentare cântăresc doar 15 grame.
Întregul etrier, inclusiv electronica de putere și control, cântărește 45.
Prinderea poate prinde un obiect din plastic neted cu suficientă forță pentru a-și susține propria greutate atunci când obiectul este ridicat în aer cu o frânghie.
„Acest exemplu demonstrează excelent cât de mici, ușoare și eficiente sunt actuatoarele HALVE. Înseamnă, de asemenea, că am făcut un pas uriaș către obiectivul nostru de a crea sisteme integrate bazate pe mușchi.”, spune Katzschmann cu satisfacție.
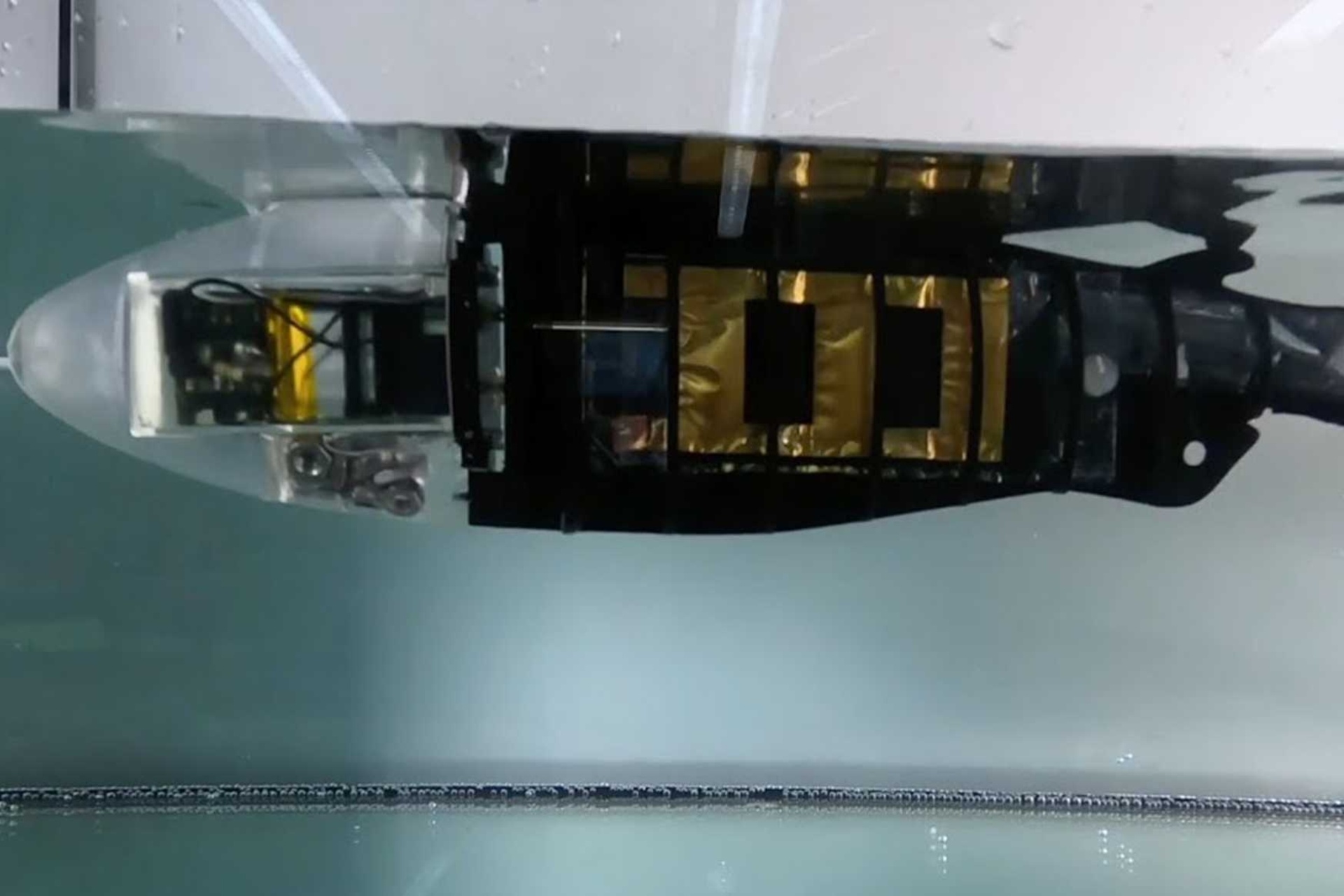
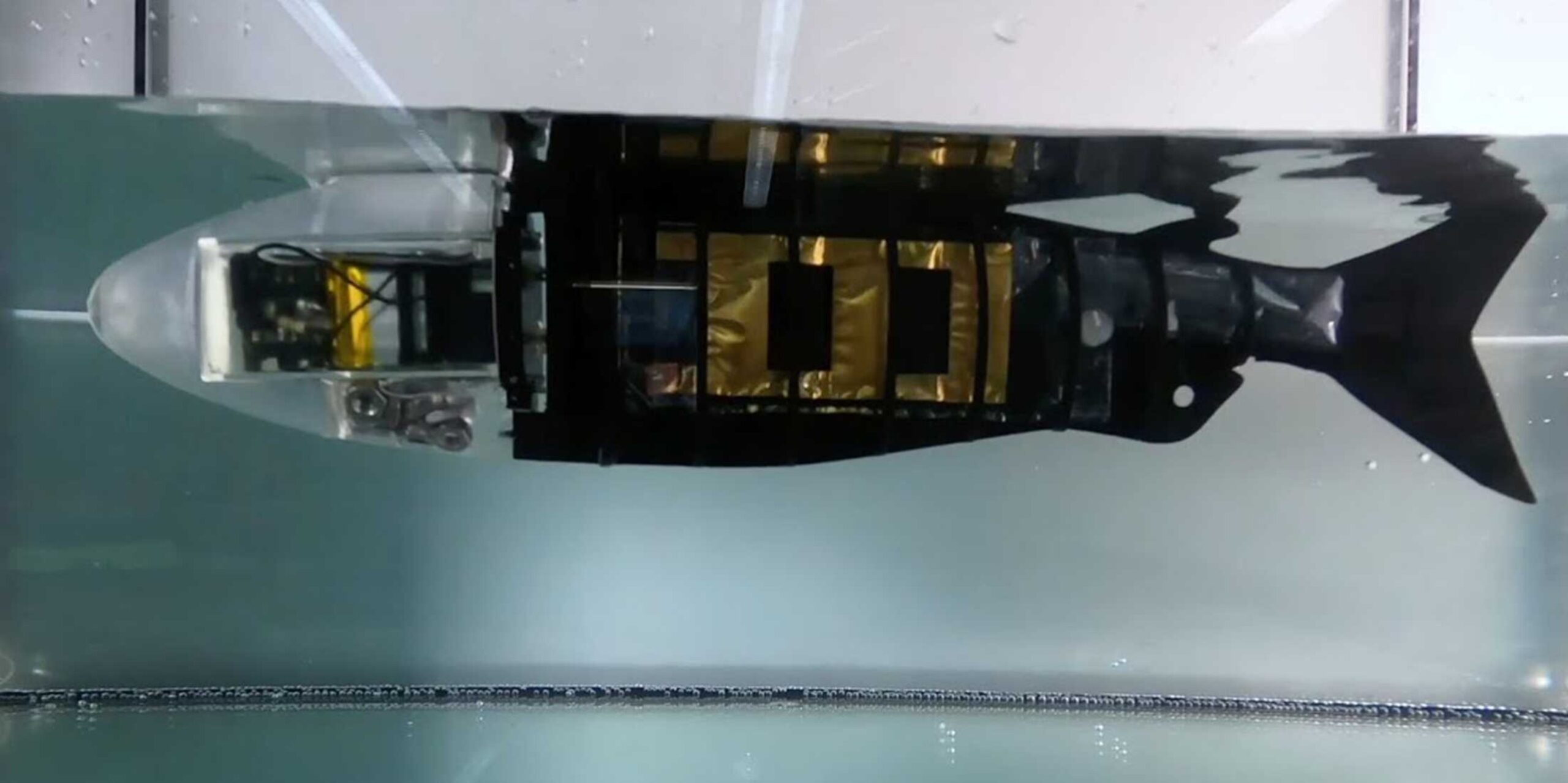
Al doilea obiect este un înotător asemănător unui pește, lung de aproape 30 de centimetri, capabil să se miște ușor în apă.
Este format dintr-un „cap” care conține electronica și un „corp”, flexibil, la care sunt atașate actuatoarele „Electrostatice de joasă tensiune amplificate hidraulic”.
Aceste actuatoare se mișcă alternativ într-un ritm care produce mișcarea tipică de înot.
Peștele autonom poate trece dintr-o stare de stază cu o viteză de trei centimetri pe secundă în 14 secunde, și toate acestea scufundat în apă obișnuită de la robinet.
Un câine robot: invenția elvețiană inspirată din biologia animală
În Elveția, Politehnica Federală pentru IA transparentă și de încredere

Noile actuatoare sunt mult mai robuste decât alți mușchi artificiali și sunt rezistente la apă
Acest al doilea exemplu este important deoarece demonstrează o altă caracteristică nouă a actuatoarelor HALVE.
Deoarece electrozii nu mai sunt protejați în afara carcasei, mușchii artificiali sunt acum impermeabili și pot fi folosiți chiar scufundați în lichide conductoare.
„Peștele ilustrează un avantaj general al acestor actuatoare: electrozii sunt protejați de mediul extern și, invers, mediul este protejat de electrozi. Deci, puteți folosi aceste actuatoare electrostatice în apă sau le puteți atinge, de exemplu.”, adaugă profesorul de la Institutul Federal de Tehnologie din Zurich.
Structura stratificată a plicurilor are și un alt avantaj: noile actuatoare sunt mult mai robuste decât alți mușchi artificiali.
În mod ideal, plicurile ar trebui să poată face o mișcare mare și să facă acest lucru rapid.
Cu toate acestea, chiar și cea mai mică eroare de fabricație, cum ar fi un fir de praf între electrozi, poate duce la o defecțiune electrică, un fel de „mini fulger”.
Pe 4 noiembrie, la Lausanne, „Ziua elvețiană a roboticii”
Cu DroneHub o „volară” fără precedent pentru cercetarea cu drone

Probleme „mini-fulger” rezolvate, companii pregătite pentru producție la scară largă
„Când s-a întâmplat acest lucru la modelele anterioare, electrodul sa ars, creând o gaură în carcasă. Acest lucru a permis lichidului să scape și a făcut actuatorul inutilizabil”, explică Stephan-Daniel Gravert.
Această problemă a fost rezolvată la JUȚĂTATE actuatoare deoarece o singură gaură se închide, în esență, datorită stratului exterior de plastic protector.
Ca urmare, carcasa rămâne pe deplin funcțională chiar și după o defecțiune electrică.
Cei doi cercetători sunt în mod clar fericiți că au făcut o descoperire decisivă în dezvoltarea mușchilor artificiali, dar sunt și realiști.
După cum spune Robert Katzschmann, „Acum trebuie să pregătim această tehnologie pentru producția pe scară largă și nu putem face asta aici, în laboratorul ETH. Fără a face prea multe dezvăluiri, pot spune că deja înregistrăm interes din partea companiilor care ar dori să colaboreze cu noi.”
De exemplu, mușchii artificiali ar putea fi folosiți într-o zi în noi roboți, proteze sau dispozitive portabile.
Cu alte cuvinte, în tehnologiile de utilizare în și pe corpul uman...
O zmeură din... silicon pentru a instrui roboții să recolteze
Omagiu potrivit de la Lugano tinerei echipe de robotică Smilebots



Grip neconstrâns, acționat de JUȚĂTATE actuatoare, prinde un bloc de PLA
Pește artificial nelegat, acționat de actuatoare HLVE, în apă de la robinet
Ați putea fi interesat și de:

În Brazilia, prima întâlnire din lume între biosecuritate și sincrotroni
În Campinas, un laborator de izolare biologică maximă de nivel NB4 va fi conectat la sursele de lumină ale unui accelerator de particule.

În Alto Adige astăzi EDIH NOI este noul punct de referință pentru AI
La Bolzano, 4,6 milioane de euro din fondul PNRR vor fi alocați pentru servicii către companiile locale în domeniul digitalizării informațiilor...
Austria, Germania și Elveția pentru căi ferate de marfă „mai inovatoare”.
Miniștrii DACH Leonore Gewessler, Volker Wissing și Albert Rösti: introducerea Digital Automatic Pairing este un element cheie

Persuasiune sau manipulare? Geneza și impactul istoric al PR
Așa se face că Relațiile Publice, de la dialogul sofisticat al Greciei antice până la era digitală actuală, continuă să ofere inovație continuă

 //
//